
Multibody systems are technical systems consisting of different rigid or
flexible bodies that are interconnected. The connections may be modeled
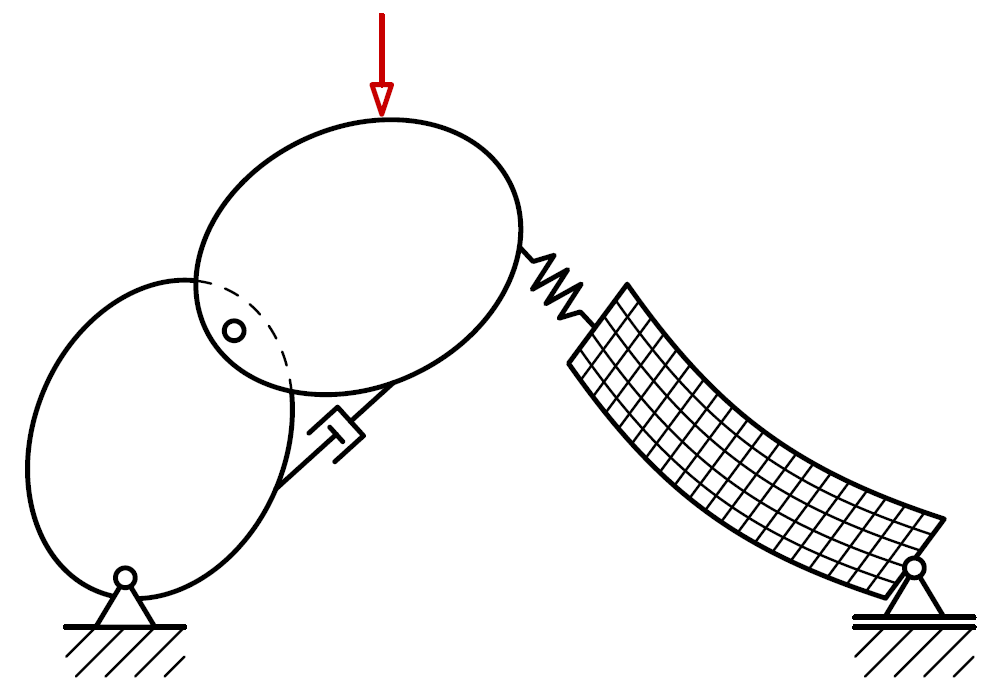
with classical force laws (massless springs and dampers, actuators,
contact) or realized by kinematical constraints, e.g. joints. In the
meantime multibody simulation programs are well established and can be
found in a variety of industrial sectors, for example in aeronautical
engineering or in the automobile industry. In consideration of initial
and boundary values, a multibody simulation provides the transient
motion of the bodies as well as the forces and moments acting in the
connections between bodies. Embedding the Finite Element Method (FEM)
into the framework allows to concurrently simulate rigid and flexible
bodies and their interactions. Topics:
- Dynamics of rigid bodies (Newton-Euler equations, Lagrange equations, Hamilton principle, ...)
- Relative kinematics in space (spatial rotations, ...)
- Assembly of a multibody system (link forces, constraints, ...)
- Considering flexible bodies
- Time integration (Newmark integration scheme, linear/nonlinear systems, constraints, ...)
- Dozent: Michael Kreutz
- Dozent: Daniel Rixen
- Dozent: Tomas Slimak
- Dozent: Johanna Walch
- Dozent: Andreas Zwölfer